In today's digital world, the number of employees needed for an online business can greatly vary. Factors like the business model, target audience, and workload play a significant role in determining the team size. As a small online business owner, I've found that a lean team of dedicated professionals can often deliver excellent results. However, it's crucial to strike the right balance between having enough team members to handle the workload and not overspending on excessive staff. Ultimately, the key is to assess your business's unique needs and find the sweet spot for your team size.
Starting an online business with just $30 might seem like a daunting task, but it's definitely achievable. To begin, I would focus on identifying a niche market that I am passionate about and has potential for growth. Next, I would create a simple yet professional website using low-cost platforms like WordPress or Wix. To promote my business, I'd take advantage of free marketing strategies such as social media and content creation. Lastly, I would invest time in learning and implementing effective SEO techniques to drive organic traffic to my website.
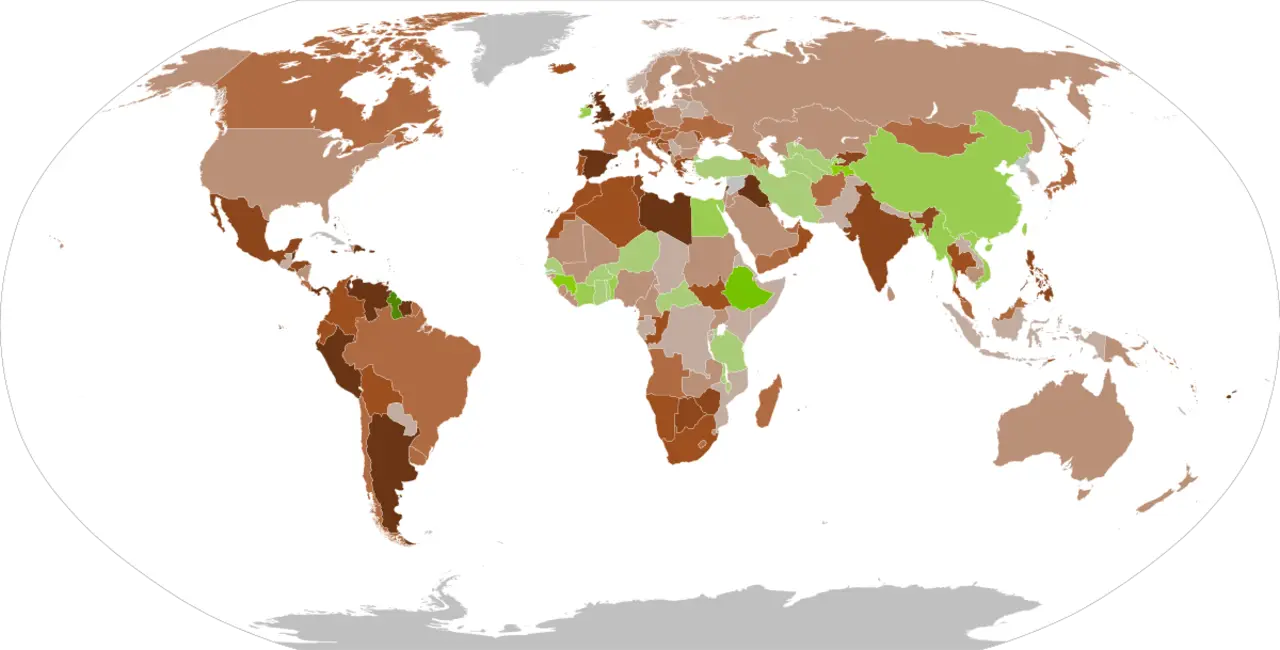
Inflation plays a significant role in determining a country's GDP. As a blogger, I've noticed that when inflation is moderate, it can positively impact GDP by encouraging spending and investments. However, if inflation rates get too high, it can lead to negative consequences, such as decreased purchasing power and economic instability. Ultimately, the relationship between inflation and GDP is a delicate balancing act, where stability is essential for maintaining healthy economic growth. In summary, inflation can be both a driving force and a potential detriment to a country's GDP, depending on its level and management.
As a business owner, I've come to realize that our influence on our businesses is immense. We not only set the vision and direction for our companies, but also shape the culture through our values and leadership style. Our decisions, big or small, play a crucial role in determining the success of our ventures. Additionally, our ability to manage risks, adapt to changes, and invest in our employees directly impacts the growth and sustainability of our businesses. In summary, owners have a significant influence on their businesses, and it's essential for us to be mindful of the impact we have on every aspect of our companies.
As a blogger, I've noticed that a change in interest rates can significantly impact economic growth. When interest rates rise, borrowing becomes more expensive, which can lead to a decrease in consumer spending and business investment. Conversely, lower interest rates make borrowing more affordable, potentially stimulating consumption and investment. It's essential to find the right balance, as too high interest rates can slow down the economy, while too low rates can result in inflation. Ultimately, central banks play a crucial role in managing interest rates to foster the right environment for sustainable economic growth.
Economic development is a fascinating topic! It refers to the process of improving the overall well-being and quality of life for people within a country or region. This often involves increasing income levels, creating job opportunities, and improving access to essential services like healthcare and education. It's important to remember that economic development is not just about money, but also about creating sustainable and inclusive growth for everyone. So, let's keep exploring and learning about this crucial aspect of our world!
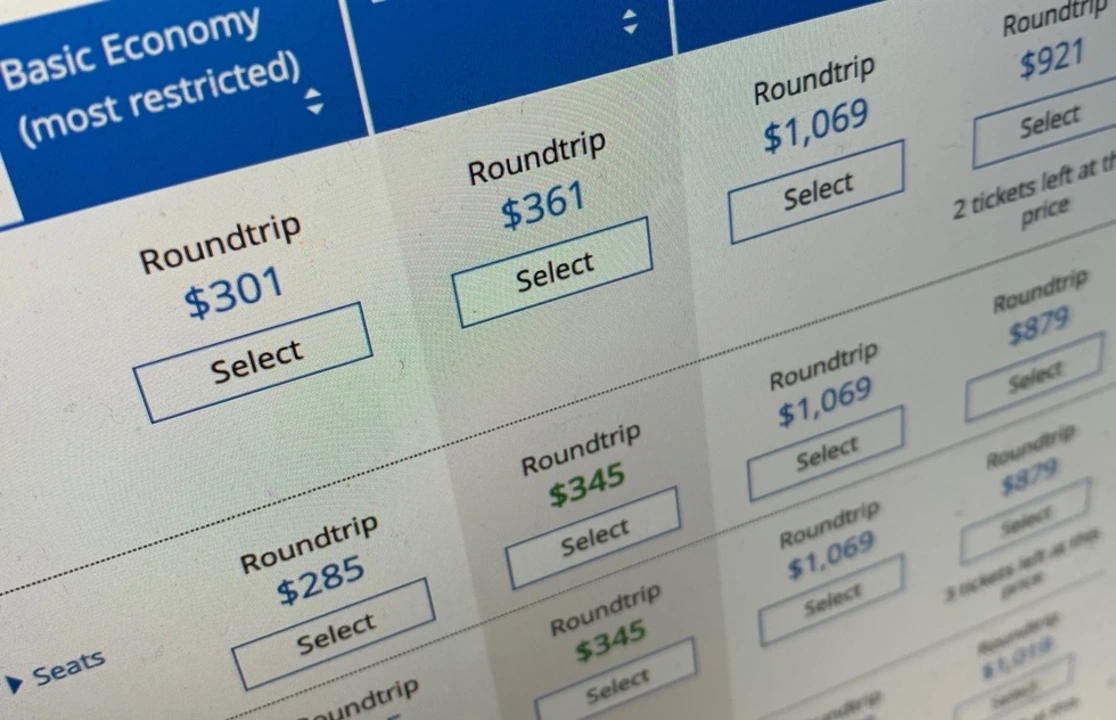
I recently found myself wondering if I had purchased a basic economy ticket for my United flight. To determine this, I checked my confirmation email for any mention of "basic economy." Additionally, I logged into my United account and verified the fare class of my ticket. Another option is to call United's customer service for confirmation. Knowing your fare class is important to understand any restrictions or perks associated with your ticket.
Starting your own real estate business can be challenging, but it's not impossible. In my experience, the initial steps include obtaining a real estate license, building a strong network, and developing a comprehensive business plan. It's crucial to be prepared for the financial investment required for marketing, office space, and other expenses. Additionally, patience and perseverance are key, as it often takes time to establish your business and build a client base. Overall, starting a real estate business can be demanding, but with dedication and hard work, success is achievable.
In designing a new school system in the US, I would prioritize equal access to quality education for all students, regardless of their background. I'd emphasize critical thinking, creativity, and collaboration in the curriculum, moving away from standardized testing as the sole measure of success. Additionally, I'd incorporate more practical life skills and career preparation, while also promoting cultural and emotional intelligence. Lastly, I'd ensure that teachers receive proper compensation and support to create a more effective, motivated, and passionate educational workforce. Together, these changes would create a more inclusive, well-rounded, and successful school system for future generations.
Social media has had a dramatic impact on businesses in recent years, making it easier for companies to reach potential customers and interact with them in real time. It has also enabled businesses to create relationships with their customers and build trust, allowing them to increase brand awareness and generate more sales. The effects of social media can be both positive and negative, as it can be used to spread misinformation or damage a company’s reputation. However, when used correctly, social media can be a powerful tool for businesses to reach their target audience, build relationships with customers, and increase their visibility.